he nature of frictional interactions between two natural surfaces is difficult to predict.
A general design strategy has been developed for preparing multi-component interfaces with on-demand frictional features.
A friction law was devised between the normal load applied to the interface and the targeted macroscopic friction force.
Predicting the frictional behavior between two surfaces in close proximity has proven to be very challenging. Dr. Julien Scheibert, CNRS researcher at the tribology and systems dynamics laboratory at École Centrale de Lyon in Écully, France, says, “Two natural surfaces that form a dry contact interface usually exhibit complex topographies making it difficult to predict the nature of the frictional interaction. Adding to the problem is interference from contaminants such as humidity, and chemicals. The result is predicting the coefficient of friction remains a formidable challenge.”
Gaining a better understanding of the frictional effects at dry interfaces is, however, important in the use of many devices such as touchscreens and robotic hands (see for instance a past TLT article
1 that discussed the development of a new law that can assist with helping design new robots to perform specific tasks).
Figure 1
2 illustrates the complex interactions that can occur when two surfaces are in close proximity to each other.
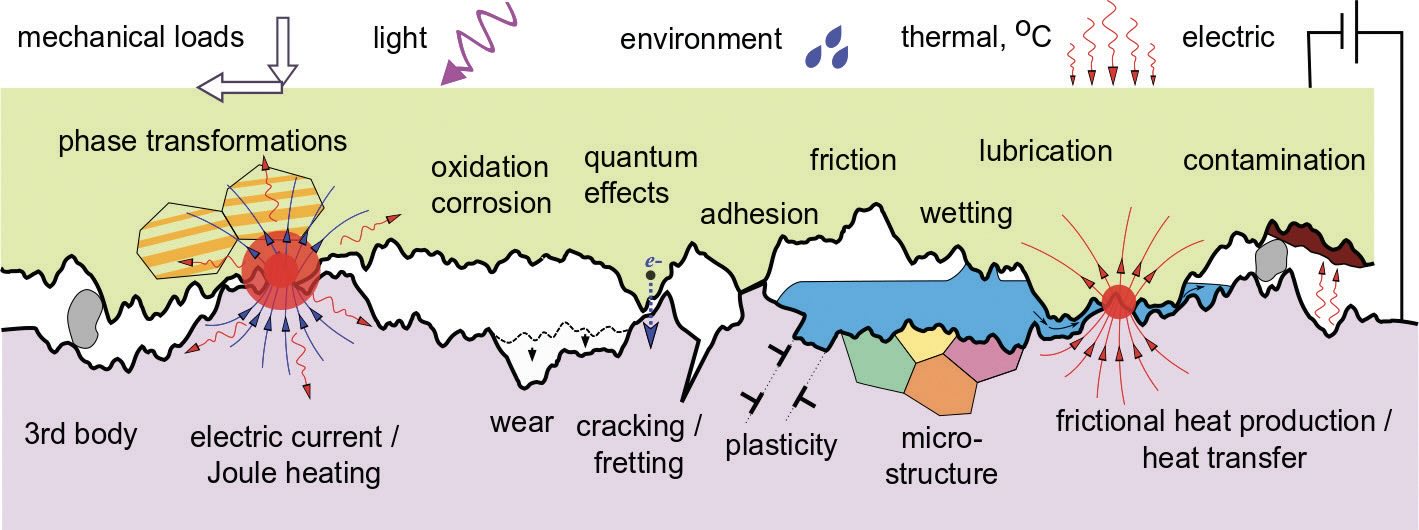 Figure 1. The complex interactions that can occur when two surfaces are in close proximity to each other are shown. Figure adapted from Vakis, A., et al. (2018), “Modeling and simulation in tribology across scales: An overview,” Tribology International, 125, pp. 169-199.
Figure 1. The complex interactions that can occur when two surfaces are in close proximity to each other are shown. Figure adapted from Vakis, A., et al. (2018), “Modeling and simulation in tribology across scales: An overview,” Tribology International, 125, pp. 169-199.
One way of tackling this challenge of developing dry interfaces with improved frictional characteristics is through surface functionalization. Scheibert says, “The current process is to conduct trial and error experiments to reach the desired frictional characteristics. At each step, a certain topography is created at various length scales or a specific coating is added to a solid surface. But we lack a general strategy allowing one to be good on the first try.”
Scheibert and his colleagues took on the challenge of developing such a general design strategy for preparing multi-component interfaces with on-demand frictional features. The approach starts by considering the flat-flat interface between a smooth and a rough surface. Designing the rough surface is done by assembling individual microasperities with well-controlled geometrical properties and calibrated contact and friction behaviors to form the topography of the rough surface. Such materials with artificially conceived microstructures are known as metamaterials.
In building these contact interfaces, this leads to what Scheibert designates as the formation of metainterfaces. He says, “We created the term metainterface which is inspired by the broad field of metamaterials. Metainterfaces are provided with controlled macroscopic interfacial behaviors, such as their friction or compressibility. With this, we can design contacts with new properties by engineering the surface micro-topograhics.”
In the next step, the researchers devised a friction law between the normal load applied to the interface and the targeted macroscopic friction force. Scheibert says, “We then utilized an inversion step that involves moving from the macroscopic to the microscopic level to design a rough surface that meets the requirements of the targeted macroscopic friction force. This step is called an inversion because it reverts the usual scope of predicting the macroscopic behavior from a known microscale topography.”
The researchers applied their strategy to a frictional interface between polydimethylsiloxane (PDMS) and glass. They first calibrated individual PDMS sphere versus glass-plane contacts. Scheibert says, “This is a well-known system that we have worked with for about 20 years. A benefit is that contacts between these two surfaces have been well characterized giving useful information on single asperity laws that can be applied to the friction model we are developing. Another benefit is that PDMS is an elastomer which will not tear apart as empirical testing is done to validate our approach.”
To study a macroscopic frictional interface, a surface was prepared consisting of a square lattice with 64 PDMS, spherical cap asperities. The surface was prepared by molding the PDMS slab on an aluminum master, itself prepared using a sphere-ended cutting tool in a micromilling machine
(see Figure 2). A linear-elastic asperity-based friction model was inverted to complete the design strategy for reaching desired frictional behavior.
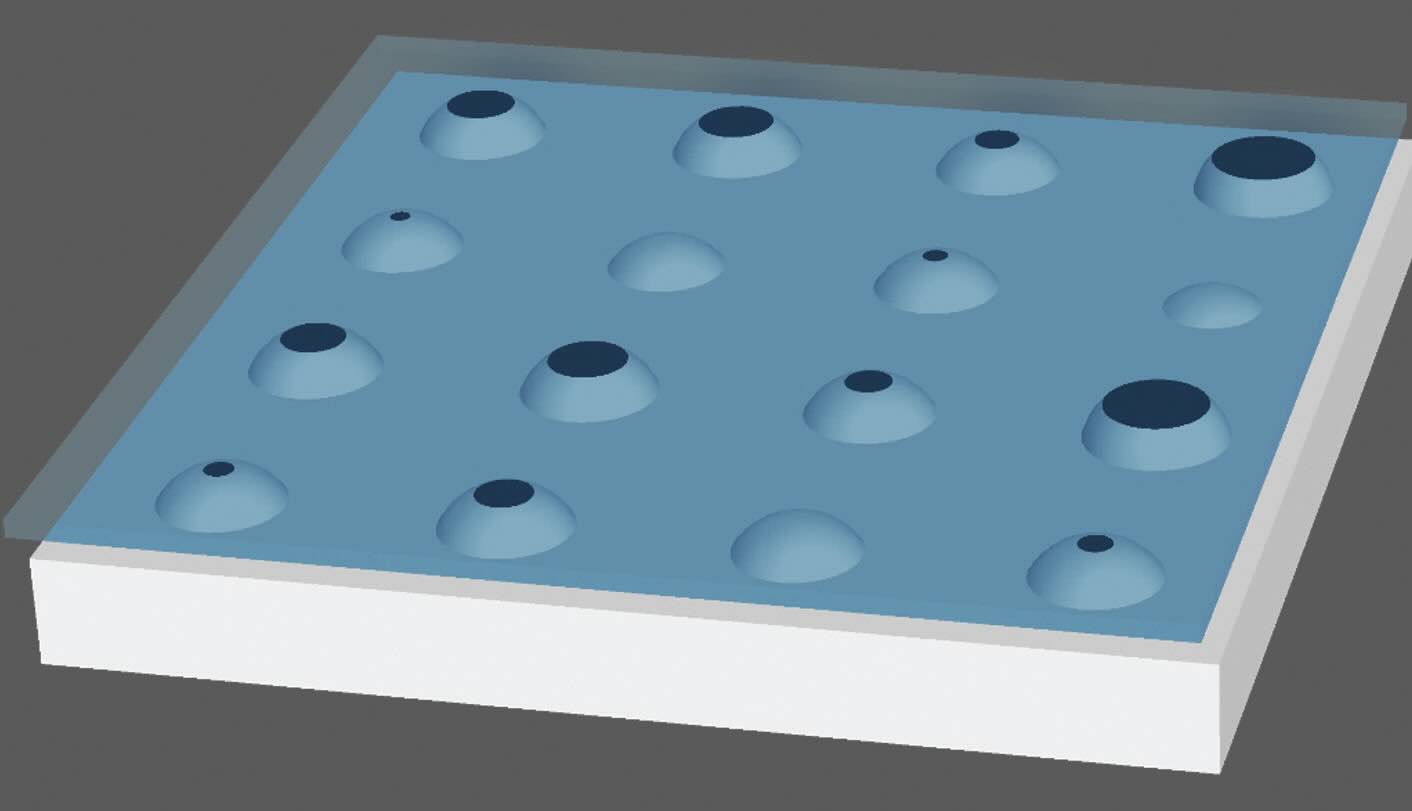 Figure 2. A surface was prepared to study a macroscopic frictional interface consisting of a square lattice with 64 PDMS, spherical cap asperities. Figure courtesy of @N. Morgado, LTDS.
Figure 2. A surface was prepared to study a macroscopic frictional interface consisting of a square lattice with 64 PDMS, spherical cap asperities. Figure courtesy of @N. Morgado, LTDS.
The researchers then presented three examples to demonstrate that their approach can build specified friction laws. Scheibert says, “The first example focused on using the coefficient of friction which is the classic manner of describing the frictional properties of an interface. We generated two friction laws that are linear, and the coefficient of friction values obtained are within 2.1% of the targets. The other two examples involved natural, non-linear friction laws. They demonstrate that our interface design strategy can be applied to create a whole variety of complex on-demand frictional behaviors.”
The researchers hope to extend their approach in evaluating miniature systems. Scheibert says, “We also intend to work with other materials besides PDMS. Metals are an obvious choice but the challenge for us is the occurrence of wear on metal surfaces. In contrast, negligible wear was observed with PDMS.”
Additional information on this research can be found in a recent article
3 or by contacting Scheibert at
julien.scheibert@cnrs.fr.
REFERENCES
1.
Canter, N. (2021), “Better understanding of elastohydrodynamic friction in robotics and haptics,” TLT,
77 (8), pp. 16-17. Available at
here.
2.
Vakis, A., Yastrebov, V., Scheibert, J., Nicola, L., Dini, D., Minfray, C., Almqvist, A., Paggi, M., Lee, S., Limbert, G., Molinari, J., Anciaux, G., Aghababaei, R., Restrepo, S., Papangelo, A., Cammarata, A., Nicolini, P., Putignano, C., Carbone, G., Stupkiewicz, S., Lengiewicz, J., Costagliola, G., Bosia, F., Guarino, R., Pugno, N., Müser, M. and Ciavarella, M. (2018), “Modeling and simulation in tribology across scales: An overview,”
Tribology International, 125, pp. 169-199.
3.
Aymard, A., Delplanque, E., Dalmas, D. and Scheibert, J. (2024), “Designing metainterfaces with specified friction laws,”
Science, 383 (6679), pp. 200-204.